|
|
手术机器人,或者辅助手术机器人,是最近几年科研和投资的热点,受到越来越多投资人和创业者的青睐。目前的新冠疫情进一步让大家意识到了医疗行业机器换人的潜在价值。+ \' V* P; T) u- G- l
9 ]& D e4 K. N) w美国、欧洲、日本的手术机器人临床应用已较为成熟,国内受制于技术起步晚、医疗认证周期较长等原因,目前进入临床应用的还不多。不过已有不少科研团队已经进入这个赛道,走在融资、研发、拿证的路上。应用场景涵盖多个领域,包括:骨科手术、神经外科、肿瘤消融、其它微创手术、整形外科、牙科、植发、按摩、针灸、减肥等。
6 D4 Y: W' F# Y% `1 s2 k/ B+ G+ K. G. L) l
如何研发一套完整的手术机器人?创业团队需要掌握哪些关键技术?& m7 \7 [* k! l/ J8 k; c; q- Y2 j+ Z I, i
, o x8 a4 L: {* E8 |手术机器人的价值在于它的精准性和稳定性。因为人的眼睛误差远大于精密光学仪器,人的手也会抖动或疲劳而机械臂不会。所以,一套手术机器人首先需要一个机械臂来替代医生的手,或帮助医生进行手术器械的辅助定位。如下图:
3 @! u# P. q8 L2 ]
( }9 t6 h$ B. a
3 u( ^; L5 L4 k/ \(医疗机械臂)
# d! b T4 C% Q: @
- @7 w1 O6 L7 Y6 _& R
) G: Y3 @- y% G9 t/ s+ k. J1 n* @( {(辅助手术定位)
: h( A4 A" h4 E! ?1 K9 E: H7 V+ J( T8 a7 w' f
其次,手术机器人只有手是不行的,它还需要一双眼睛。因为有了视觉,才可以保证手臂能够按照医生的手术规划进行精确的移动或旋转(六自由度移动)。这就需要一套三维空间定位系统,根据技术原理不同一般分为两种类型:红外光学定位系统、电磁定位系统。如下图所示:
, A9 m; W( n, I
& L0 m# Y5 h# c/ s- s 6 g$ e6 h/ S) R+ E; c 6 g$ e6 h/ S) R+ E; c
(红外光学定位系统)' p* Y ~5 m2 }$ ]. b9 N
) ~& P3 W% v. A* F7 u' J. m4 H
 3 \* d y# F9 w2 I" u, w, |2 o 3 \* d y# F9 w2 I" u, w, |2 o
(红外光学定位系统反光球工具)$ V/ T* ?% D, f g% t
6 s' q" z, t% l. q

3 s, s, v0 L) C$ A! L+ @: ]+ b(电磁定位系统)2 ? a* I- b/ n" J: [
- B3 R+ X+ x1 r3 |3 a& I# e* n

1 Z6 t) y* p+ u7 z! p(电磁定位系统sensor)3 R( v( o6 y: o. j7 k' ]
) A$ J1 g0 k/ ?( G
好了,有了机器人的手臂和眼睛这些必备的硬件外,其余就需要科研团队的软件能力了,也就是手术机器人的大脑。这些大脑功能大致包括:DICOM医学影像三维重建、图像分割、坐标系配准、影像分析、多模态融合、手术前规划、术中器械实时导航、术后评估等功能。当然除此以外,系统还需要把各个硬件系统集成起来以实现实时通信,并反复调试,以确保整套系统的稳定性和安全性。
Y' D+ s# p% _. A( @, ?
" s9 V2 S) ?4 O) e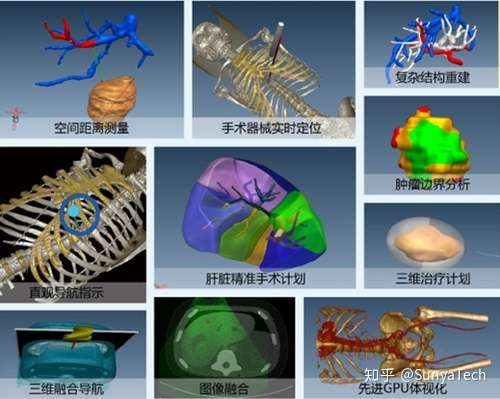
- n2 v+ `* A! t(手术机器人软件功能)
/ x K6 U7 Q) Z5 {
" J t* R- G/ e4 C& l# g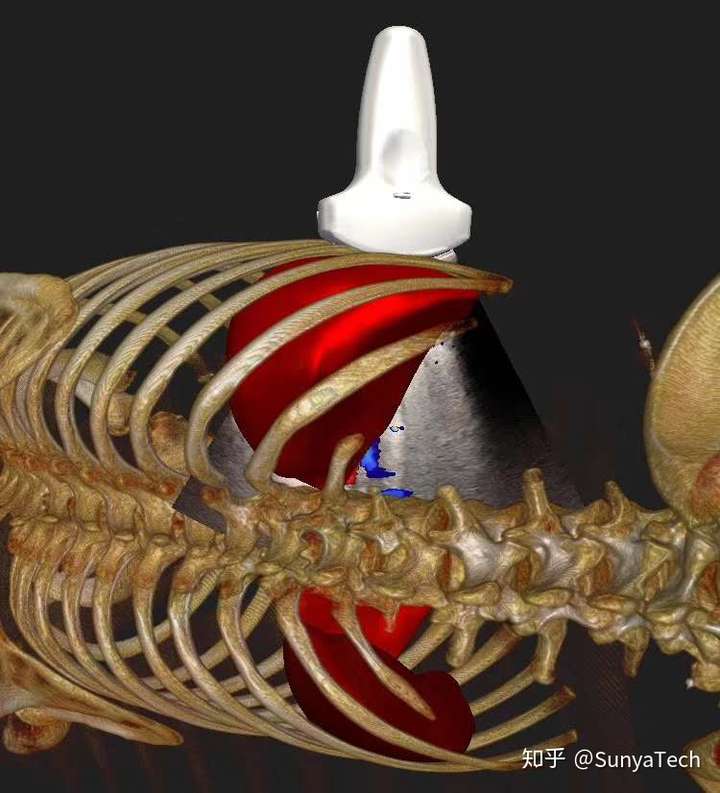
. `3 ^4 Q8 b7 }; ?(多模态影像融合导航)* W& }1 i* S& r) I( g4 m
以上大致可以实现一个手术机器人的基本功能,如果要实现一些复杂的高级功能则远远不够。比如AI医疗,这需要软件算法具备三维图像自动分割、自动配准、图像识别等高级功能,对研发团队的技术实力要求很高。如果需要实现远程医疗,即机器人遥操作,则除了以上提到的硬件外,还需要配备一台力反馈设备。
& G: d% F+ B$ n: l
]4 |) r& s. Z8 w$ V总体来说,手术机器人技术方兴未艾,以上所提到的仅仅是现有阶段的情况描述,随着技术的发展和越来越多科研团队的介入,相信进入临床辅助医生、造福患者已不再遥远。
5 m- j3 ]9 j# }& M5 r3 o4 V
% y* _5 _* A8 W" _- V(舜若科技原创,转载请注明出处) |
|


 发表于 2020-3-20 15:00:57
发表于 2020-3-20 15:00:57
